Made for self-driving research

Introducing WeGo-ST MINI, which enables indoor and outdoor self-driving research.
As product name infers, WeGo-ST MINI is a smaller version of WeGo-ST featuring a four-wheel drive and independent suspension. It has a maximum speed of 10 km/h and is a low-cost UGV platform that can be used for self-driving research and education. It is capable of RS-232 communication, and tasks can be performed using the preferred program on this R&D platform. A joytick with an E-STOP function can be used to control the device. WeGo-ST MINI has a four-wheel drive and drives quietly without making noise.
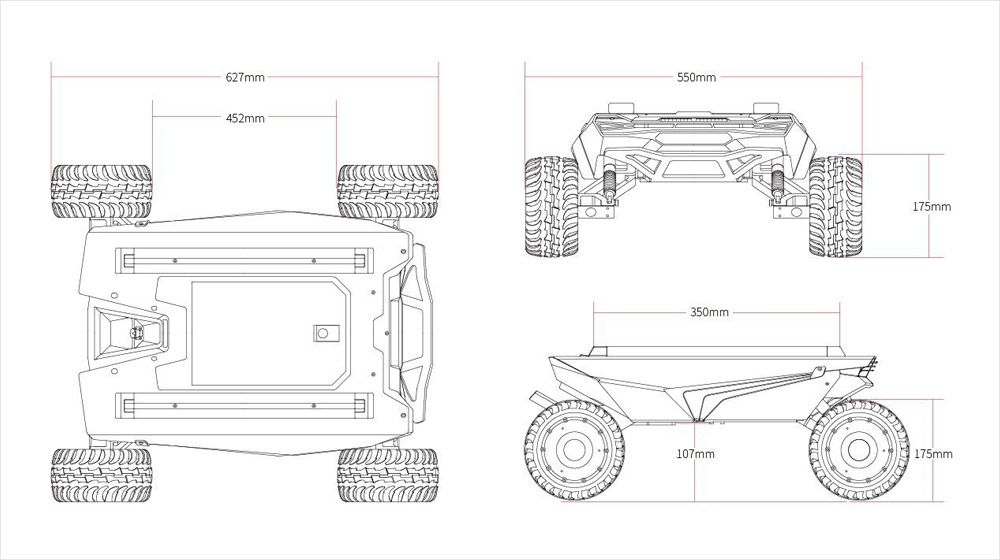
The top profile makes it easy to mount sensors. A mecanum wheel-type product was also released recently. It is used together with an educational curriculum for distribution transport at various schools for educational purposes as well. The size is 627×550×252 mm. There is the regular four-wheel drive and the mecanum wheel type (In -Wheel motor).
Major characteristics and advantages of the mecanum wheel
1. Left/right movement and turning is possible without a steering device, allowing for high efficiency compared to the structure/cost.
2. The driving radius is small, allowing for good mobility and usage of space.
3. Efficient transport/loading is possible between processes, reducing process times.
Standard Wheel / Mecanum Wheel
Products also come in mecanum wheel variants.

| Dimensions (W x H x D) | 627x 550 x 252 mm |
| Vehicle Weight | 20 kg |
| Wheelbase | 452 mm |
| Track | 450 mm |
| Battery | 리튬 배터리 / 24V-15Ah |
| Battery Operating Temperature | -20~60ºC |
| Charger | AC 220V Independent Charger |
| Battery Charging Time | 2H |
| Outward Supply | 24V |
| Minimum Ground Clearance | 107 mm |
| Minimum Turning Radius | 0 m (In-situ Rotation) |
| Max Speed | 10.8km/h (Standard Wheel) 10.8km/h (Mecanum Wheel) |
| Rate Travelling Load | 20 kg (Standard Wheel) 50 kg (Mecanum Wheel) |
| Climbing Ability | <30º With Loading |
| Obstacle Surmounting Capacity | 70 mm |
| Communication interface | Standard CAN 232 Serial Port |
| Protection Level | IP22 |
| Suspension Form | Independent Suspension With Rocker Arm |
How to operate the WeGo-MINI (controllable) and set the manual, auto, and driving modes
1. Platform power On / Off
2. Turn on power by pressing two buttons of the joystick at once
*warning: before turning on the power, the top joystick needs to be pointing towards the top
3. Lowering the second switch on the joystick allows for left/right movement