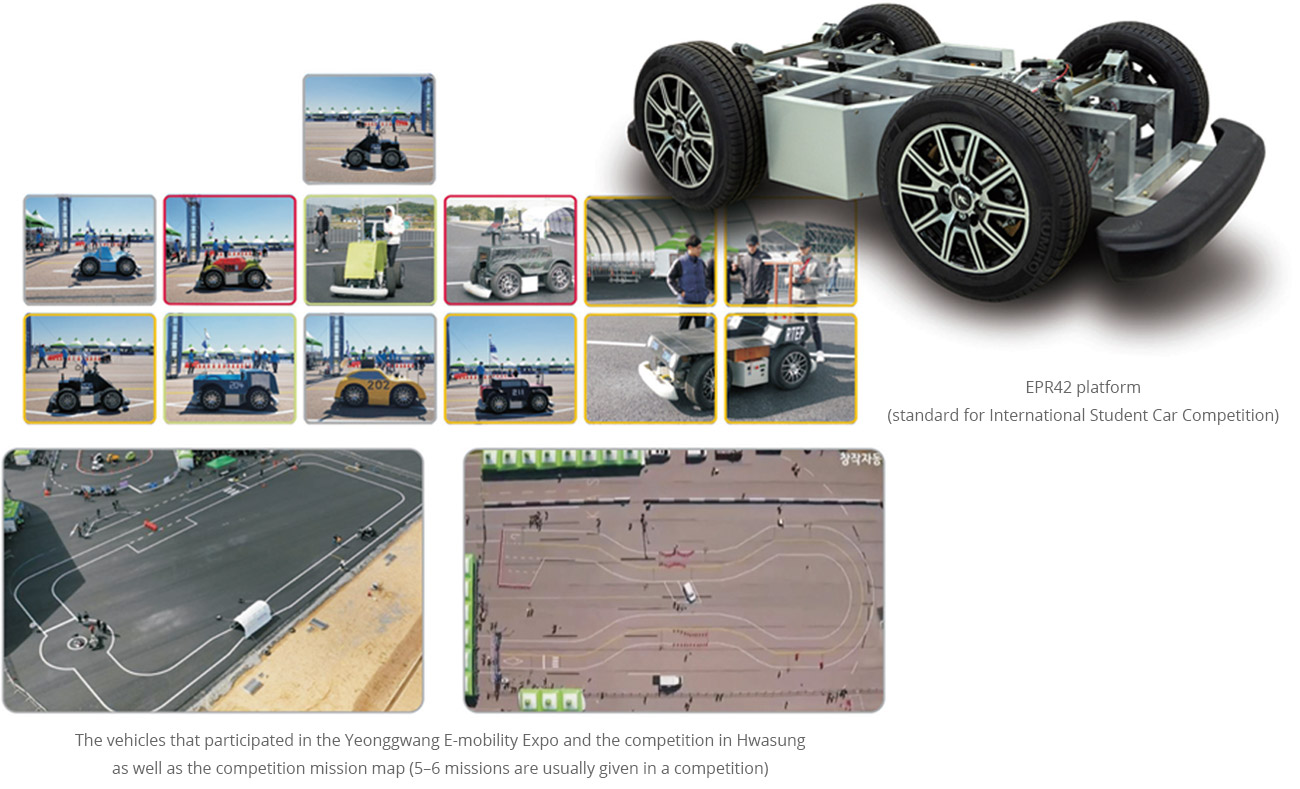
There is much interest in control technology for self-driving robots; that is why the International Student Car Competition that is held every year is being held this year in K-City, Hwasung. ERP42 is being used as a standard platform required for this competition. The same is applicable overseas. Please direct any inquiries if there is any.

Using the WeGo- ERP42 platform, various research, practical training, and learning can be performed. LiDAR, radar, cameras, GPS, and other sensors can be connected to a (embedded) controller and link it to the lower driving part controller to success fully control a basic self-driving robot.
A remote controller is also provided, and the platform size is (L×W×H: 1,600×1,160×550 mm). Various sensors can be mounted additionally to apply the product to vari ous different patterns of practical training and research. We also sell simulation software for the product, as simulation is an essential part of self-driving. Depending on the use, there are academic (Base, Full Version) and research (Professional, Developer Suite) versions available.
The driving simulation has vehicles, driving environments, sensors, etc. modeled in a virtual environment, allowing for the development of a self-driving vehicle in said environments. The simulator outputs actual vehicle and sensor data and takes speed and steering commands, safely allowing control of a vehicle . The data produced are similar to actual results.
A virtual car model identical in size and shape to ERP-42 and with similar dynamics provides the same serial communication protocol.

Remote controller power switch
Turn the power of the remote controller on before turning on the platform.

Platform power switch
Turn the Power ON/OFF Switch on in the platform’s main switch panel.
|
플랫폼 사이즈 Platform size |
|
|---|---|
|
휠 사이즈 Wheel size |
|
|
서스펜셔(앞/뒤) Suspension (front/back) |
|
|
브레이크(앞/뒤) Brakes (front/back) |
|
|
구동방식 Drive-type |
|
|
구동 모터 Motor |
|
|
배터리 Battery |
|
|
통신 인터페이스 Communication interface |
|
|---|---|
|
플랫폼 컨트롤러 Platform controller |
|
|
원격 조종기 Remote controller |
|
|
작동시간 Operating time |
|
|
충전시간 Charging time |
|
|
적재 하중 Live load |
|
|
주행 속도 Traveling speed |
|
|
지원언어 Supported languages |
|

Self-driving simulation software
- The simulator outputs vehicle data and sensor data, and takes speed and steering commands to move the car.
- The simulator’s output is identical to sensor protocols that are actually used.(Velodyne, GPS nmea, Camera etc.)
- HILS function: simulation function includes hardware (vehicle, controller). Communication between self-driving software and the simulator can be performed via serial or UDP.
- A virtual car model identical in size and shape to ERP-42 and with similar dynamics is provided. The same serial communication protocol is provided.
- UDP provided for virtual car control
(Protocol exclusive to the simulation, and serial option are also available)
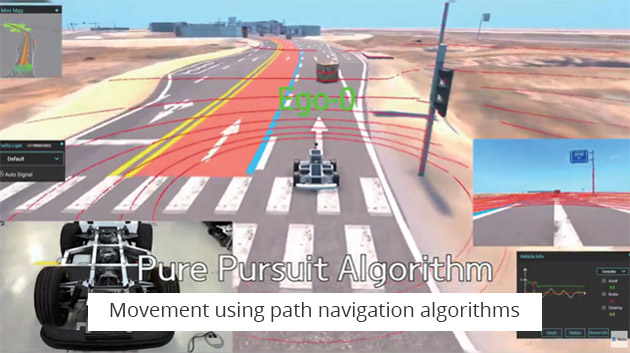
A vehicle the size of an ERP42 can be synced with the ERP42 simulation, and the pure pursuit algorithm and obstacle avoidance algorithm can be used to simulate self-driving.
An emergency braking system using actual sensors (LiDAR) is also included. Simulation is performed using actual data from LiDAR and cameras.
An emergency braking system using actual sensors (LiDAR) is also included. Simulation is performed using actual data from LiDAR and cameras.
Functions and characteristics
- Path navigation can be generated within the simulation, and the vehicle drives by the GPS (X,Y) value of the generated path.
- The vehicle and sensor information output by the simulation is used to control the simulated vehicle and the actual vehicle.
- Simulated and actual cars can be controlled using actual sensor and vehicle data.
- The sensor data types offered by the simulation are GPS, Lidar, and cameras; traffic light data can also be input
A vehicle the size of an ERP42 can be synced with the ERP42 simulation, and the pure pursuit algorithm and obstacle avoidance algorithm can be used to simulate self-driving. An emergency braking system using actual sensors (LiDAR) is also included. Simulation is performed using actual data from LiDAR and cameras.
- Path navigation can be generated within the simulation, and the vehicle drives by the GPS (X,Y) value of the generated path
- The vehicle and sensor information output by the simulation is used to control the simulated vehicle and the actual vehicle
- Simulated and actual cars can be controlled using actual sensor and vehicle data
- The sensor data types offered by the simulation are GPS, Lidar, and cameras; traffic light data can also be input
|
연구/기업 Professional Research/Corporate Professional |
연구/기업 Standard Research/Corporate Standard |
학생 Full Student Full |
학생 Basic Student Basic |
Trial |
FEATURES |
설명 Description |
|
|---|---|---|---|---|---|---|---|
| O | O | O | O | O |
Vehicle Model Vehicle Model |
실제 차량의 크기와 외형이 같은 3D 모델 및 실제차량과 통신 프로토콜이 동일한 가상의 차량 제공 A virtual vehicle with a 3D model identical to the size and appearance of the actual vehicle that uses the same communication protocol as the actual vehicle is provided |
|
| O | O | O | O | O |
Ground Truth Data Ground Truth Data |
정답 데이터(주변 물체의 위치, 가상공간에서의 정확한 차량 위치 등) Truth data (The location of surrounding objects, the exact location of the vehicle in the virtual space, etc.) |
|
| O | O | O | O | X |
Sensor Models Sensor Models |
기본 센서 모델 (Camera, Lidar, GPS, ...) Basic sensor models (Camera, Lidar, GPS, ...) |
상용 센서와 유사한 규격을 따르는 센서 모델 Sensor models follow specifications similar to commercial sensors |
| Option | X | X | X | X |
커스텀 센서 모델 (e.g. Velodyne, Ublox,...) Custom sensor models (e.g. Velodyne, Ublox,...) |
사용자가 요청한 실제 센서들의 모델링 Modeling of user-requested sensors |
|
| O | O | O | O | O |
Maps Maps |
직진 트랙 (종방향 제어 테스트) Straight track (longitudinal control test) |
종방향 테스트가 가능한 가상 공간 Virtual space where longitudinal testing can be performed |
| O | O | O | O | X |
원형 테스트 트랙(경로 추종, 장애물 회피) Round test track (path tracking, obstacle avoidance) |
주어진 경로 추종 및 장애물 회피 테스트가 가능한가상 공간 A virtual space where tracking of set paths and obstacle avoidance can be tested |
|
| O | O | O | X | X |
K-City K-City |
경기도 화성의 K-City를 그대로 모사한 앱(가상의 GPS값과 실제 GPS값이 같다) An app that accurately models K-City in Hwasung, Gyeonggi-do (virtual GPS values and actual GPS values are identical) |
|
| O | O | O | X | X |
Sensor Calibration환경 Sensor Calibration Environment |
센서의 성능 테스트 및 Calibration이 가능한 앱 App that allows sensor performance testing and calibration |
|
| Option | X | X | X | X |
커스텀 트랙 Custom Tracks |
사용자가 요청하는 트랙 제작 (실제 도로 구간도 제작 가능) User-requested tracks are created (actual road sections can be created) |
|
| Option | X | X | X | X |
기타기능 Other functions |
Ghost 차량 배치 기능 Ghost car placement |
가상의 환경의 데이터를 실제 차량에 데이터를 전송하여다양한 실험이 가능한 기능(상세 설명은 문의) This functions allows various experiments to be performed via sending virtual environment data to actual vehicles (please send an inquiry for more information) |
| Option | X | X | X | X |
다중 클라이언트 환경 Multi-client environment |
하나의 트랙에 여러 클라이언트가 접속이 가능한 기능 Allows many clients to connect to a single track |
|
| Win10 Linux |
Win10 Linux |
Win10 Linux |
Win10 Linux |
Win10 |
시뮬레이터 실행 환경 Simulator execution environment |
시뮬레이터를 실행하는 환경 Environment in which simulator is run |
|
| O | O | O | X | X |
기술 지원 Technical support |
시뮬레이터 기술지원 Simulator technical support |
|