For distribution transport, WeGo-Apollo has automatic charge feature

APOLLO is a SLAM-based robot. It has sensors and is capable of self-driving. It has a depth camera, ultrasonic sensors, and LiDAR sensors; the robot arms can be raised and put to use in various applications.
For distribution transport, WeGo-Apollo has automatic charge feature
- Auto-charging system
- Remote management system using cloud service
- SDK support, depth camera, LiDAR, ultrasonic sensor, cliff sensor
- It can makes less noise in an indoor environment.
Possible applications:
Guide robots, quarantine robots
| 기본 구성 | Basic composition | SLAM Localization | |
| 옵션 구성 | 엘리베이터 자율탑승, 멀티 맵핑 | Option composition | Autonomous elevator boarding, multimapping |
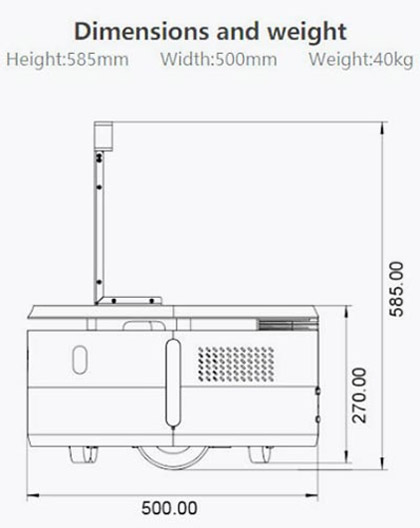
| 사이즈 | Size | 500×270×585 mm | |
| 모터 | Motor | 24 V BLDC | |
| 제어기 | Controller | MCU | |
| 페이로드 | Payload | 35 Kg | |
| LiDAR | 측정거리 15 m | Measured distance 15 m | |
| 초음파센서 | 3ea 장착, 측정거리 40 cm | Ultrasound sensor | 3 ea, measured distance 40 cm |
| Depth 카메라 | 측정거리 1.3 m | Depth camera | Measured distance 1.3 m |
| 클리프 센서 | 3ea 장착, 최소측정거리 5 cm | Cliff sensor | 3 ea, minimum measured distance 5 cm |
| 맵핑 | 최대 측정거리 150 m × 150 m | Mapping | Maximum measured distance 150×150 m |
| 최대속도 | Maximum speed | < 0.7 m/s | |
| 배터리 | 자율충전 : 220-240V / 배터리 운용시간 : >12h / 자율충전시간: 5.5h | Battery | Autonomous charging: 220–240 V / Battery life: >12 hours / Autonomous charging time: 5.5 hours |
| 하드웨어 인터페이스 | 이더넷, 15pin DB | Hardware interface | Ethernet, 15pin DB |
| 소프트웨어 인터페이스 | Software interface | SLAMWARE ™ : Windows / iOS / Android / Linux | |
| 지원언어 | Supported languages | C, ROS |
Apollo – SLAM-based self-driving service robot
Slamtec Apollo – Product introduction