Vision-based obstacle avoidance

New Patented
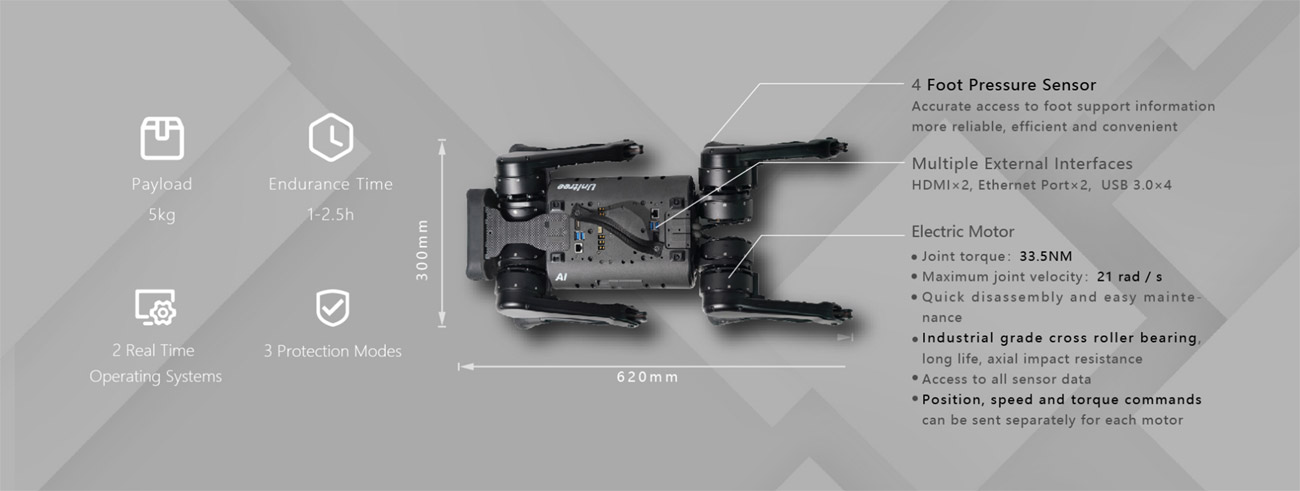
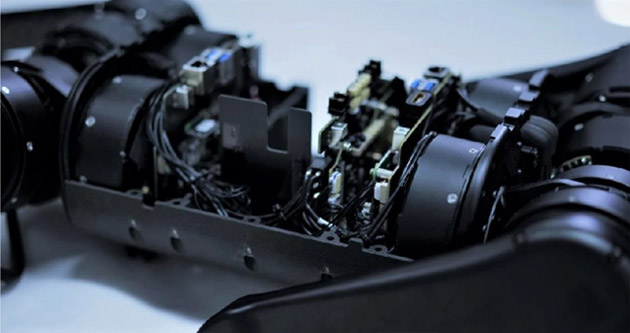
Body Structure and Layout Design
- High strength and light body structure. Easy to maintain.
24V external power input interface. 5V, 12V, 19v external output power supply.
Convenient for external connection of various expansion equipment. - It is equipped with high-performance dual master control (sensing master control and motion master control) as standard. External
- interface 4 * USB, 2 * HDMI, 2 * Ethernet.
- Master control can be upgraded to TX2, etc.
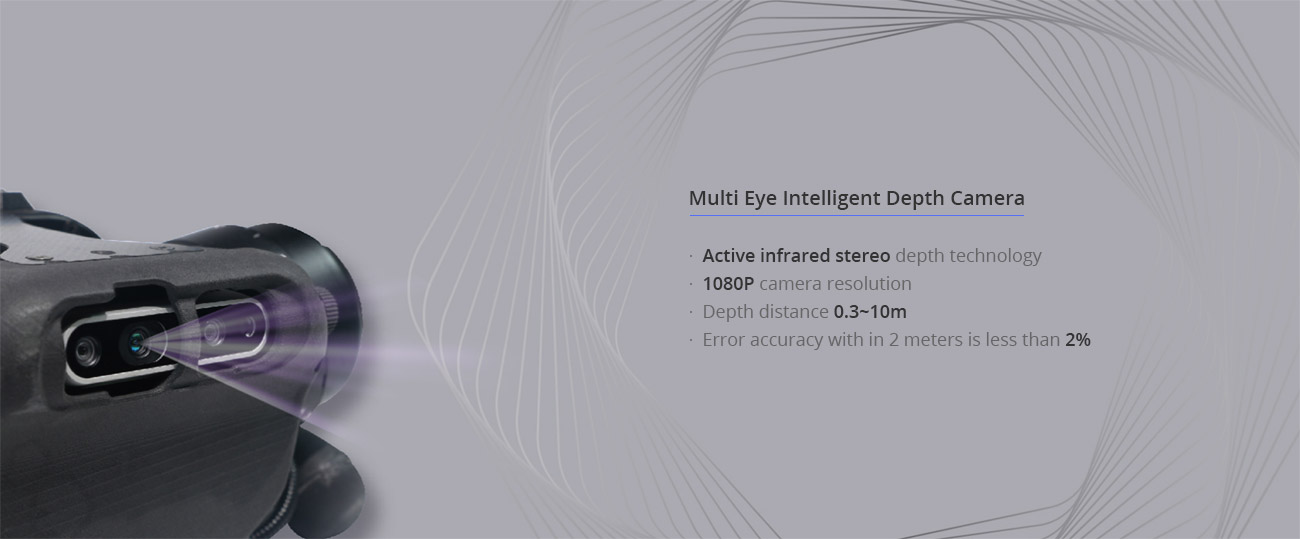
- Standard equipments include realsense depth cameras, providing map building and obstacle avoidance functions.

Sensitive
Patented foot touch
- High strength and light body structure. Easy to maintain.
24V external power input interface. 5V, 12V, 19v external output power supply.
Convenient for external connection of various expansion equipment. - It is equipped with high-performance dual master control (sensing master control and motion master control) as standard. External
- interface 4 * USB, 2 * HDMI, 2 * Ethernet.
- Master control can be upgraded to TX2, etc.
- Standard equipments include realsense depth cameras, providing map building and obstacle avoidance functions.

Vision Based Autonomous Target Following
- Real time tracking of objects (people, specific moving objects) in the visual range
- Support online learning of following target features. Good tracking robustness
- High real-time follow. Video stream refresh speed can reach 25-30 frames/s
- By adjusting the color of the tracking box (green (100%) ~ red (0%)) to display the confidence of the tracking target in real time

Vision Based Autonomous Obstacle Avoidance
- Avoid obstacles within 0.8m of the robot’s visual angle range
- It can detect the distribution of obstacles in the robot’s view range in real time to adjust the body position
- Real time display of adjustment angle of robot body, maximum distance and area within the view angle and the range of walking track
| 모델 | 외관 | 제품설명 | Model | Appearance | Product description |
|---|---|---|---|---|
| WeGo-A1 Basic | WeGo-A1 Basic |  |
|
|
| WeGo-A1 Explorer |
|
WeGo-A1 Explorer |
|
|
| WeGo-A1 Aliengo Basic | WeGo-A1 Aliengo Basic |  |
|
|
| Aliengo add 2D LIDAR |
|
Aliengo add 2D LIDAR |
|
|
| Aliengo add 3D LiDAR(VLP-16LINE) |
|
Aliengo add 3D LiDAR(VLP-16LINE) |
|
| A1's motor | A1 battery | A1 battery charge | A1's foot pad | Aliengo battery | Aliengo's battery charge | Aliengo's foot pad | A1's motor | A1 battery | A1 battery charge | A1's foot pad | Aliengo battery | Aliengo's battery charge | Aliengo's foot pad |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
 |
 |
 |
 |
 |
 |
 |
|||||||
|
|
|
|
|
|
|
|
|
|
||||